Voxel Point Cloud
This entity converts a series of spherical point cloud captures into a single volumetric voxel model.
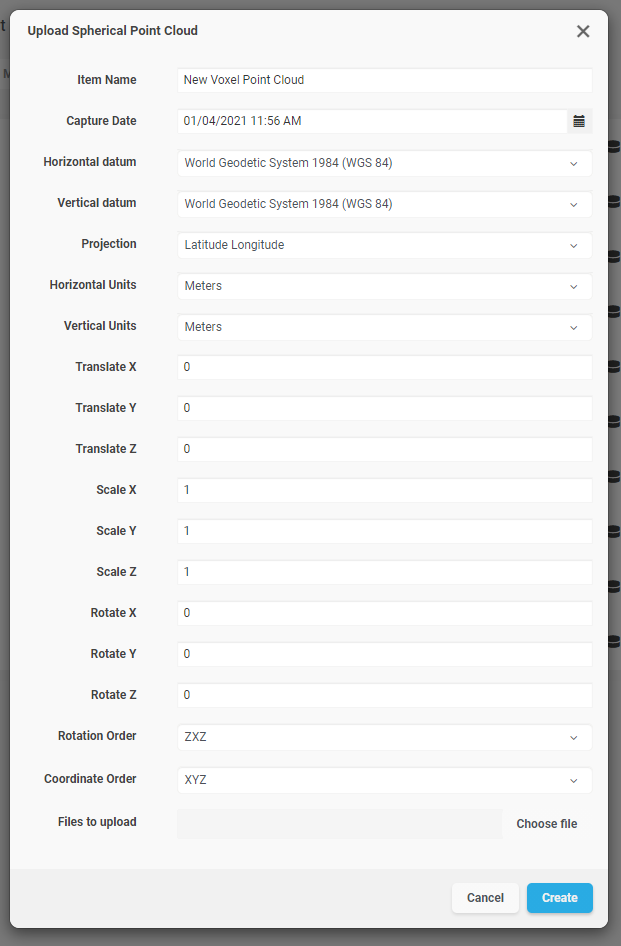
Once you select “Voxelized Points” from the “Add” menu, you will see the following options:
|
Item Name |
A readable name for the new entity |
|
Capture Device |
An optional string to identify capture device |
|
Capture Date |
An optional field containing the original capture date |
|
Horizontal Datum |
Horizontal datum used in the point cloud |
|
Vertical Datum |
Vertical datum used in the point cloud |
|
Projection |
Projection used by the point cloud |
|
Horizontal Units |
Horizontal unit type used in the point cloud |
|
Vertical Units |
Vertical unit type used in the point cloud |
|
Translate XYZ |
These fields allow translating the mesh position by the specified amounts along each coordinate axis |
|
Scale XYZ |
These fields allow scaling the mesh by the specified amounts along each coordinate axis. A value of 1.0 represents the original scale |
|
Rotate XYZ |
Euler rotation angles for each coordinate axis. |
|
Rotation Order |
Euler rotation angle sequence. |
Once you have provided values to these fields, click on “Choose Files”. This will prompt a file selection dialog where multiple files can be selected for uploading. Each file must contain a sequence of comma-separated XYZ values, where the first entry contains the coordinates of the scanning device (a LiDAR device for instance) and the remaining points are the points that were captured from that location.
Click on “Create” to begin the upload and voxelization process. You can track the upload operation from the “Pending” section in the project’s page.